


Definition of Part number:
BLSD | 24 | 05 | DC | 2Q | S | 8 | 040 | 0.5 | T | F | P | A |
BLDC drive | Rated Voltage | Peak current limit | DC input ① | Control mode | Parameter ② | Pole | Max speed range ③ | SV ramp RC time | Temp ④ | PG type ⑤ | Speed regulation type ⑥ | Sensor type ⑦ |
① : This code shows the DC Power input type of the drive: DC = Normal DC input; LDC = Ultra low voltage DC input; WDC = Wide range DC input; AC = AC input; ADC = AC and DC dual purpose.
② : This code shows the parameter type of the drive: S = Simple fixed parameter; N = Variable parameter; H = High current; SH = Small type high voltage; HV = High voltage.
③ : This code shows the max speed range of the drive, the unit is rpm/100.
④ : This code shows the temperature range of the drive: T = -40 ~ +65 ℃ , None = -10 ~ +45℃ .
⑤ : This code shows the PG type: F = PG 1x hall sensor signal/phase, None= 6 x hall sensor signal/phase.
⑥ : This code shows the speed regulation type: P = 0-3KHz speed regulation, None = voltage command..
⑦ : This code shows the hall sensor degree of the drive: A = 60° Hall sensor, None = 120° Hall sensor.
Note: In order to let the part number easier to read, Some part number code will not be shown in the specification table, a code “X” will be instead. The full part number will be provided in the quotation or the proforma invoice…
Specifications:
| Model | Temp range (ºC) | Voltage range (VDC) | I-pk (A) | I-con (A) | 60º/120º Hall sensor | PWM f(kHz) | PI Close loop of speed | SV Ramp time (S) | SV Range (V) | LV /OV | Alm | PG | Heat Sink |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BLSD1205DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 9~16 | 5 | 2.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD1210DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 9~16 | 10 | 5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD1215DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 9~16 | 15 | 7.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD1220DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 9~16 | 20 | 10 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD1230DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 9~16 | 30 | 15 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | √ |
| BLSD2405DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 17~32 | 5 | 2.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD2410DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 17~32 | 10 | 5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD2415DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 17~32 | 15 | 7.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD24020DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 17~32 | 20 | 10 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD2430DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 17~32 | 30 | 15 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | √ |
| BLSD3605DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 27~45 | 5 | 2.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD3610DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 27~45 | 10 | 5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD3615DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 27~45 | 15 | 7.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD3620DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 27~45 | 20 | 10 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD3630DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 27~45 | 30 | 15 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | √ |
| BLSD4805DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 37~55 | 5 | 2.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD4810DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 37~55 | 10 | 5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD4815DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 37~55 | 15 | 7.5 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | X |
| BLSD4820DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 37~55 | 20 | 10 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | √ |
| BLSD4830DC-2Q-S-X-XXX-XX | -10~+45 -40~+65 | 37~55 | 30 | 15 | √ | 15 | √ | 0.1~1.0 | 0~5 | √ | √ | 24p @8-pole | √ |
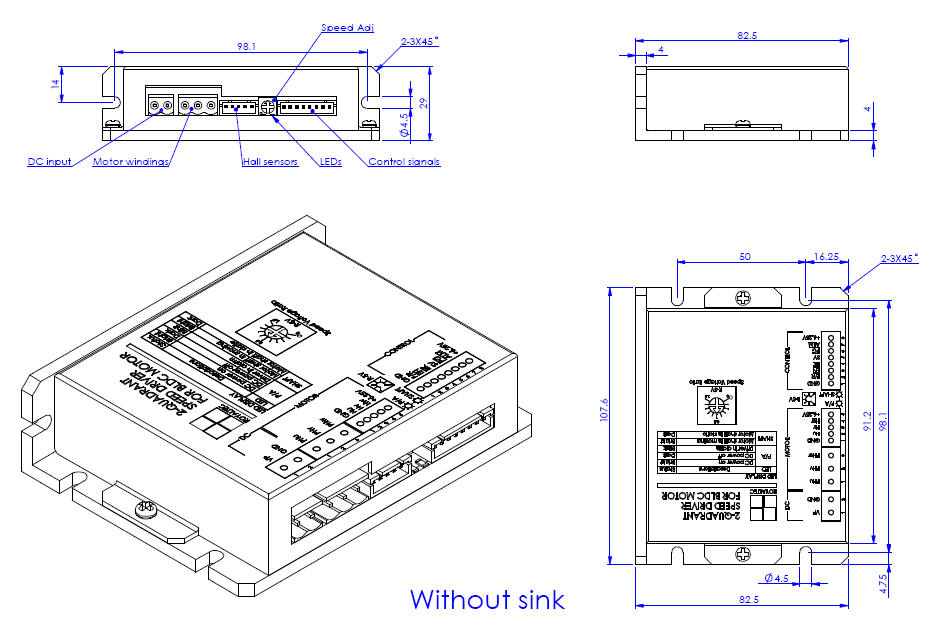
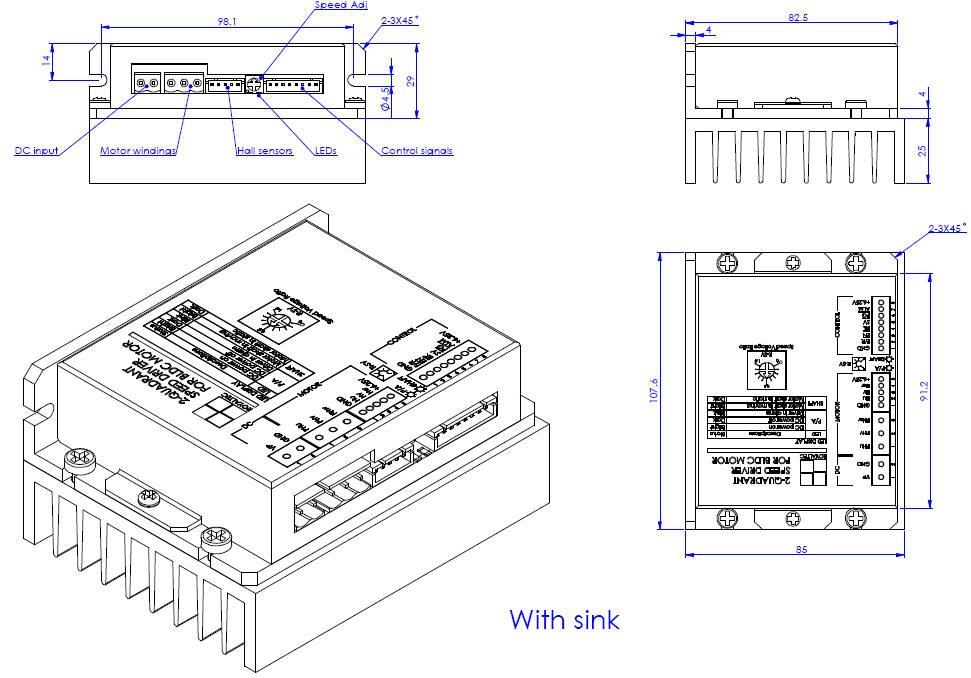
Outline:
1.Control signals:
F/R—–H or Open=Forward, L or Close=Reverse
EN——H or Open=Disable, L or Close=Enable
BK——H or Open=Running, L or Close=Brake
SV——0~5V speed reference(112K input resistance)
PG—–Speed pulse output(OC)
ALM—Alarm output(OC)
2. Hall sensors cable can not be tied together with windings cable.
3. Alarm conditions:
a. Hall sensor signals are not correct.
b. LV or OV for 2~3S.
c. Over load for 6s continuously.
d. It can be reset by Turn-Off-On DC Power or Disable the driver once.
4. LED indicator:
P/A——-Bright=Driver is OK, Blink=Driver is in alarm
SHAFT—-Bright=Motor shaft is moving, Dark=Motor shaft is in static
5. Braking operation:
The motor speed must be less than the safe brake speed Ns when you brake the motor.
For Y windings, Ns=√3 x Ip x RL x N/ (2 x Vp)
For △windings, Ns=IP x RL x N/ (2 x √3 x Vp)
Ip=Peak current(A), RL=Line to line resistance of windings(Ohm), N=No-load speed(rpm), Vp=Rated voltage(V), Ns=Safe brake speed(rpm)
6. Peak current selection:
Ip>=2xIr or Ip>=4xPo/Vp, Ip is peak current of driver(A), Ir is rated current of motor(A), Po is rated output power of motor(W), Vp is rated voltage of driver(V)

Customization:
| Heat sink | Motor tuning | Logo / brandmark |
- Heat Sink: Heat sink can be added according to customer request.
- Motor Tuning: Drivers can be tuned to fit the motors with different poles to match customer’s applications.
- Logo and brandmark: Customer’s Logo/brandmark can be printed on the frame of the driver according to the customer’s request.



